
Meet Gowi
mit: how to make (almost) anything 2017
Gowi: the antisocial robot that runs away from loud noises… and sometimes itself. I designed and fabricated all aspects of Gowi including the chassis, the wheels, and the electronics. Gowi uses analog microphones to detect loud noises as well as one ultrasonic range finder to determine if any obstacles are ahead.



chassis
Gowi’s chassis is constructed from lasercut chipboard. The interior accommodates two LiPo batteries, the electronics, the motors, the range finder, the microphones and the metal ball caster.

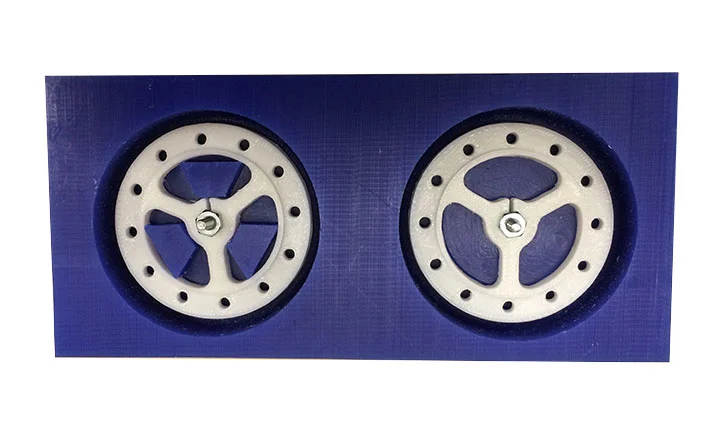


Wheels
The wheel hubs were 3d printed and press-fit onto the motor shafts. The tire mould was milled from machine wax with a CNC router and the tires were cast in place around the wheel hubs with silicone. The holes along the perimeter of the hubs ensured that the silicone formed a continuous joint to prevent the tires from slipping off.

electronics
I designed, fabricated, debugged, and wired all the electronics in Gowi. I created two "brain" boards: one dedicated to processing sound from the two microphones and one to control the motors and process the signal from the range finder. I also designed the microphone and motor driver boards.